

University of Galati
Home | Profile | Contract and annexes | Work plan | Research teams | Scientific and technical reports | Published papers | Doctoral thesis | Results | Research infrastructure
|
|
|
|
| "Dunarea de Jos"
University of Galati |
Innovation and creativity |
Project code: PN-II-PT-PCCA-2013-4-0686
Titlul proiectului: Prototipuri de sisteme robotice autonome destinate asistenței medico-sociale şi deservirii unor procese de fabricaţie din metalurgie, ceramică, sticlă și industria de automobile (ProRobSis)
Project title: Prototypes of autonomous robotic systems for medical/social assistance and servicing of manufacturing processes in metallurgy, ceramics, glass and automotive
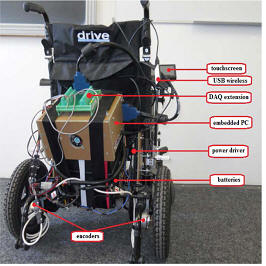
Prototipul 1 (Autonomous Wheelchair 2DW/2FW): Scaunul cu rotile pentru persoane vârstnice şi cu dizabilităţi, conceput ca robot mobil cu două roţi motoare şi două roţi libere (2DW/2FW)
Prototipul 2 (Autonomous Robot 2DW/1FW, 2DW/2FW): Robot mobil cu doua roti motoare si una sau doua roti libere, (2DW/1FW, 2DW/2FW), echipat cu manipulator robotic cu 6 grade de libertate (6-DOF)

Prototipul 3 (Autonomous Vehicle 4DW/SW): Vehicul autonom tip robot mobil cu patru roti motoare si directoare omnidirectionale, (4DW/SW), echipat cu manipulator robotic cu 6 grade de libertate (6-DOF)


Call:PN-II-PT-PCCA-2013-4-PROIECTE COLABORATIVE DE CERCETARE APLICATIVA
Prtoject code:
PN-II-PT-PCCA-2013-4-0686
Project title (EN):
Prototypes of autonomous robotic systems for medical/social assistance and servicing of manufacturing processes in metallurgy, ceramics, glass and automotive
Titlul proiectului (RO):
Prototipuri de sisteme robotice autonome destinate asistenței medico-sociale şi deservirii unor procese de fabricaţie din metalurgie, ceramică, sticlă și industria de automobile
Research area: ROBOTICS
Director proiect:
Prof. Dr. Ing. Adrian FILIPESCU
Abstract (EN):
The project aims to achieve three prototypes of autonomous robotic systems.
Prototype 1: wheelchair for elderly and people with severe and light disabilities. It is designed as a mobile robot (autonomous system) with two driving wheels and two free wheels (2DW/2FW), with a control structure based on advanced nonlinear techniques (sliding-mode and backstepping) and a structure for navigation and obstacle avoidance based on the combination between face and eye video-biometric system and a laser system and that can assist people with severe neuro-loco motor disabilities, people with light disabilities or elderly. This prototype is already called for trials and experiments to emergency hospitals from Galati and Targoviste, departments: intensive care unit, orthopaedics and neurology. Video-biometric system consists of two high-resolution cameras to monitor all person's face and eye biometric features. Since the control and navigation structure is novelty and originality in the field, it is considered patenting Prototype 1.
Prototype 2 is designed as autonomous robotic system with two driving wheels and one or two free wheels (2DW/1FW or 2DW/2FW), with a remote control system based on advanced nonlinear techniques (sliding-mode and backstepping) and a navigation and obstacle avoidance structure based on ultrasound and laser. The mobile platform is equipped with a 6-DOF manipulator whose remote control and positioning system are based on nonlinear sliding-mode techniques and visual servoing. This prototype is able to handle and transport small medium and large weights, and is designed to operate in collaborative regime for servicing flexible assembly and processing lines to make them reversible, i.e. enabling disassembly or reprocessing, respectively. Disassembly and reprocessing will trigger when the final product does not meet quality requirements for reuse or reprocessing to be brought to the required quality parameters. Prototype 2, with 2DW/1DW and/or 2DW/1FW mobile platforms, equipped with robotic manipulator is already required to be integrated into body assembly lines of the car models Dacia Logan and Sandero at automotive company "DACIA-RENAULT" Pitesti. Integration Prototype 2 as autonomous robotic system equipped with manipulator into flexible manufacturing lines, in order to make them efficient, balanced and reversible, is for the first time in the field.
Prototype 3 is designed as an autonomous vehicle with four driving and steering (4DW/SW) multidirectional wheels, able to run on any type of road. Its control system is based on advanced nonlinear techniques (sliding-mode and backstepping) having the navigation and obstacle avoidance based on laser system. This autonomous vehicle is equipped with a 6-DOF robotic manipulator, able to carry and handle large loads and weights. It is designed for handling, transport and towing operations, indoor and outdoor, into manufacturing processes in metallurgy ("ARCELOR MITTAL" Galati-department of crowding raw materials, "VAE APCAROM" Buzau-handling, towing, and transport rails to/from annealing ovens), in ceramics ("CERSANIT" Roman-traction, transport and handling sanitary ceramics between ovens and drying stations) and in glass ("STICLA" Avrig-transport and handling large sheets of glass between the ovens and drying stations). Prototype 3 conceived as autonomous robotic vehicle designed to operate multidirectional on heavy conditions of road and loads, is a premier in the field of robotic systems.
Rezumat (RO):
Prin proiect se doreşte realizarea a trei prototipuri de sisteme robotice
autonome.
Prototipul 1:
Scaunul cu rotile pentru persoanele vârstnice şi persoanele cu
dizabiltăţi severe şi usoare. Este conceput ca un robot mobil (sistem
autonom) cu doua roţi motoare şi două roţi libere (2DW/2FW), având o
structură de conducere bazată pe tehnici neliniare avansate (sliding-mode şi
backstepping) şi o structură de navigaţie şi evitare obstacole bazate pe
combinaţia dintre un sistem video-biometric al feţei şi ochiului şi un
sistem laser, astfel încât sa poată deservi atât persoanele cu dizabilităţi
neuro-loco motorii severe, cât şi persoanele cu dizabilităţi uşoare sau
vârstnice. Acest prototip este deja solicitat pentru încercări şi
experimente la spitalele de urgenţă din Galaţi şi Târgovişte, secţiile de
terapie intensivă, ortopedie şi neurologie. Sistemul video-biometric este
compus din două camere video de rezoluţie înaltă, pentru a putea realiza o
monitorizare a tuturor caracteristicilor biometrice ale feței şi ochiului
persoanei. Deoarece structura de conducere şi de navigaţie reprezintă
noutate şi originalitate în domeniu, se are în vedere brevetarea
Prototipului 1.
Prototipul 2
este conceput ca sistem robotic autonom cu două roţi motoare şi
una sau două roţi libere (2DW/1FW sau 2DW/2FW), având un sistem de conducere
de la distanţă bazată pe tehnici neliniare avansate (sliding-mode şi
backstepping) şi o structură de navigaţie şi evitare obstacole, bazate pe
ultrasunete şi laser. Platforma mobilă este echipată cu un manipulator cu 6
grade de libertate (6-DOF) al cărui sistem de conducere şi poziţionare de la
distanţă sunt bazate pe tehnici neliniare sliding-mode şi servoing vizuale.
Acest prototip este capabil să transporte şi să manipuleze sarcini de
greutăţi mici, mari şi medii, fiind destinat a opera în regim colaborativ, pentru
deservirea liniilor flexible de asamblare şi de prelucrare, pentru a le face
reversibile, adică să permită şi dezasamblare, respectiv reprelucrare.
Dezasamblarea şi reprelucarea se vor declanşa când produsul final nu
corespunde cerinţelor de calitate, în vederea refolosirii componentelor sau
reprelucrării pentru a fi adus în parametri calitativi impuşi. Prototipul 2,
în diferite variante de robot mobil, 2DW/1FW şi/sau 2DW/1FW, echipat cu
manipulator, este deja solicitat pentru a fi integrat în liniile de sudură
caroserie, asamblare preliminară şi generală ale modelelor Dacia Logan și
Sandero la "DACIA-RENAULT" Piteşti. Integrarea Prototipului 2, ca sistem
robotic autonom echipat cu manipulator, în liniile flexibile de fabricaţie,
cu scopul eficientizării, echilibrării şi reversibilizării, reprezintă
premieră în domeniu.
Prototipul 3
este conceput ca un vehicul autonom cu patru roţi motoare şi
directoare, (4DW/SW), omnidirecţionale, capabil de a rula pe orice tip de
carosabil. Sistemul de conducere este bazat pe tehnici neliniare avansate
(sliding-mode şi backstepping), iar navigaţia şi evitarea de obstacole sunt
bazate pe sistem laser. Vehiculul autonom este echipat cu un manipulator
robotic 6-DOF, capabil a transporta şi manipula sarcini grele şi de
dimensiuni mari. Este destinat operatiilor de manipulare, transport şi
tractare, intra şi extra uzinal, din metalurgie ("ARCELOR MITTAL"
Galaţi-secţia de aglomerare pentru transport materii prime, "VAE APCAROM"
Buzău-manipulare, tractare şi transport şine de cale ferată la/de la
cuptoarele de călire), ceramică ("CERSANIT" Roman-tracţiune, transport şi
manipulare obiecte ceramice sanitare intre cuptoare şi staţiile de uscare)
şi sticlă ("STICLA" Avrig-tractiune, transport şi manipulare de plăci mari
de sticlă între cuptoare şi staţiile de uscare). Prototipul 3, conceput ca
vehicul robotic autonom destinat a opera omnidirecţional în condiţii
dificile de carosabil şi sarcini grele de manipulat şi transportat,
reprezintă o premieră în domeniul sistemelor robotice.
Keywords (EN): wheelchair, wheeled mobile robot, robotic manipulator, autonomous vehicle.
Cuvinte cheie (RO): scaun cu rotile, robot mobil cu roti, manipulator robotic, vehicul autonom